Publications
2025
-
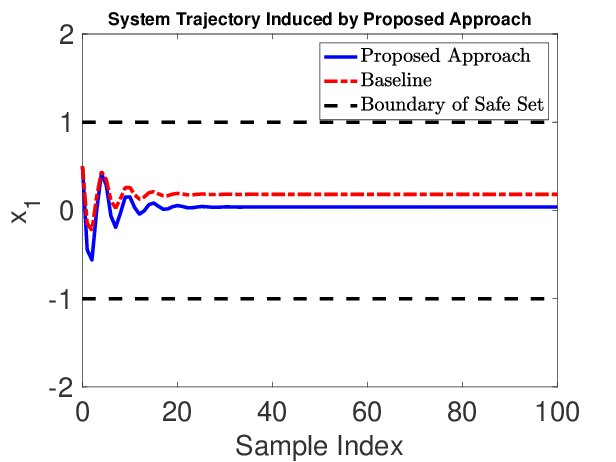
 Safe Control for Nonlinear Systems Under Faults and Attacks Via Control Barrier FunctionsIEEE Transactions on Automatic Control, 2025
Safe Control for Nonlinear Systems Under Faults and Attacks Via Control Barrier FunctionsIEEE Transactions on Automatic Control, 2025 -
 Stochastic Neural Control Barrier Functions2025
Stochastic Neural Control Barrier Functions2025


2024
-
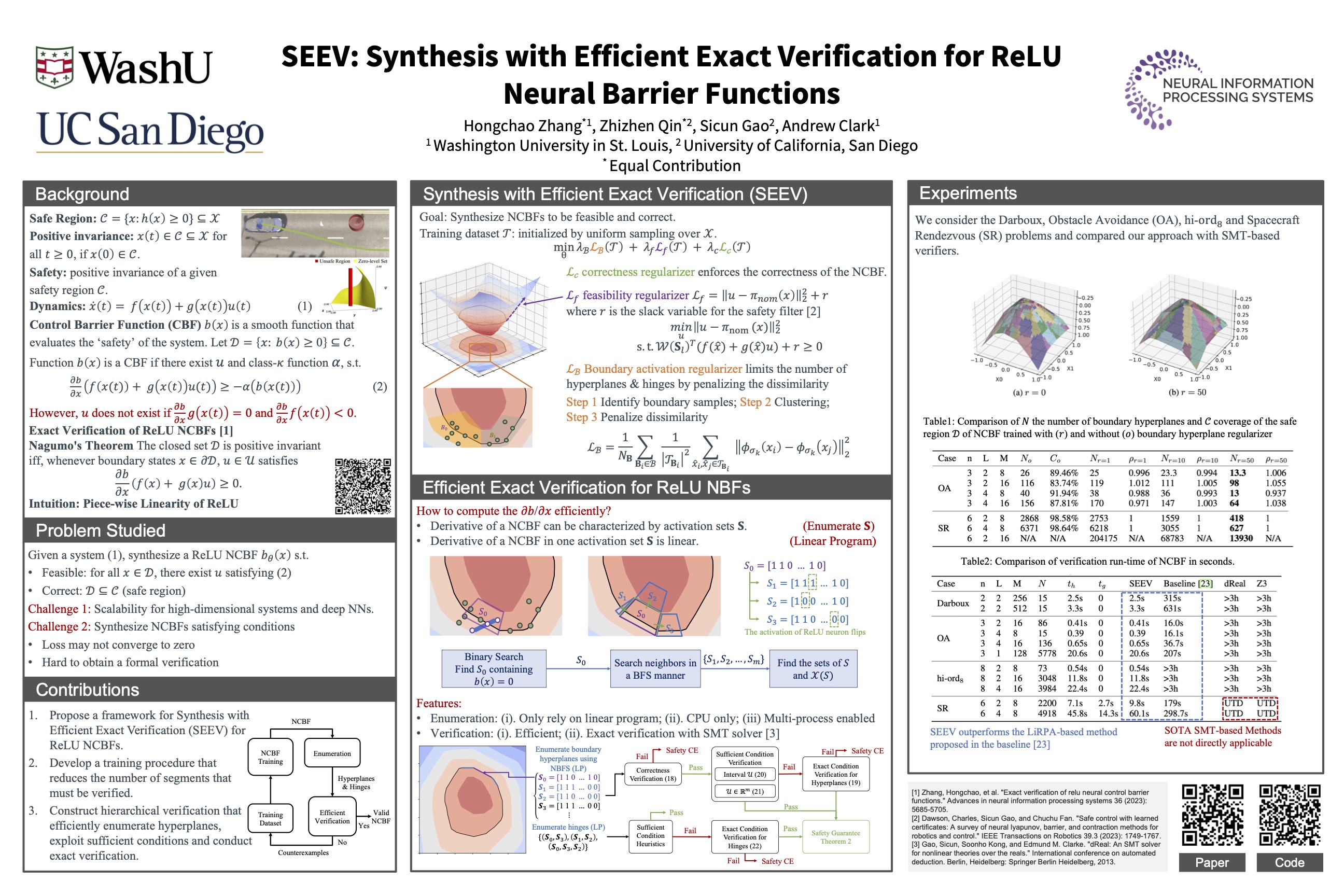 SEEV: Synthesis with Efficient Exact Verification for ReLU Neural Barrier FunctionsIn Advances in Neural Information Processing Systems, 2024
SEEV: Synthesis with Efficient Exact Verification for ReLU Neural Barrier FunctionsIn Advances in Neural Information Processing Systems, 2024 -
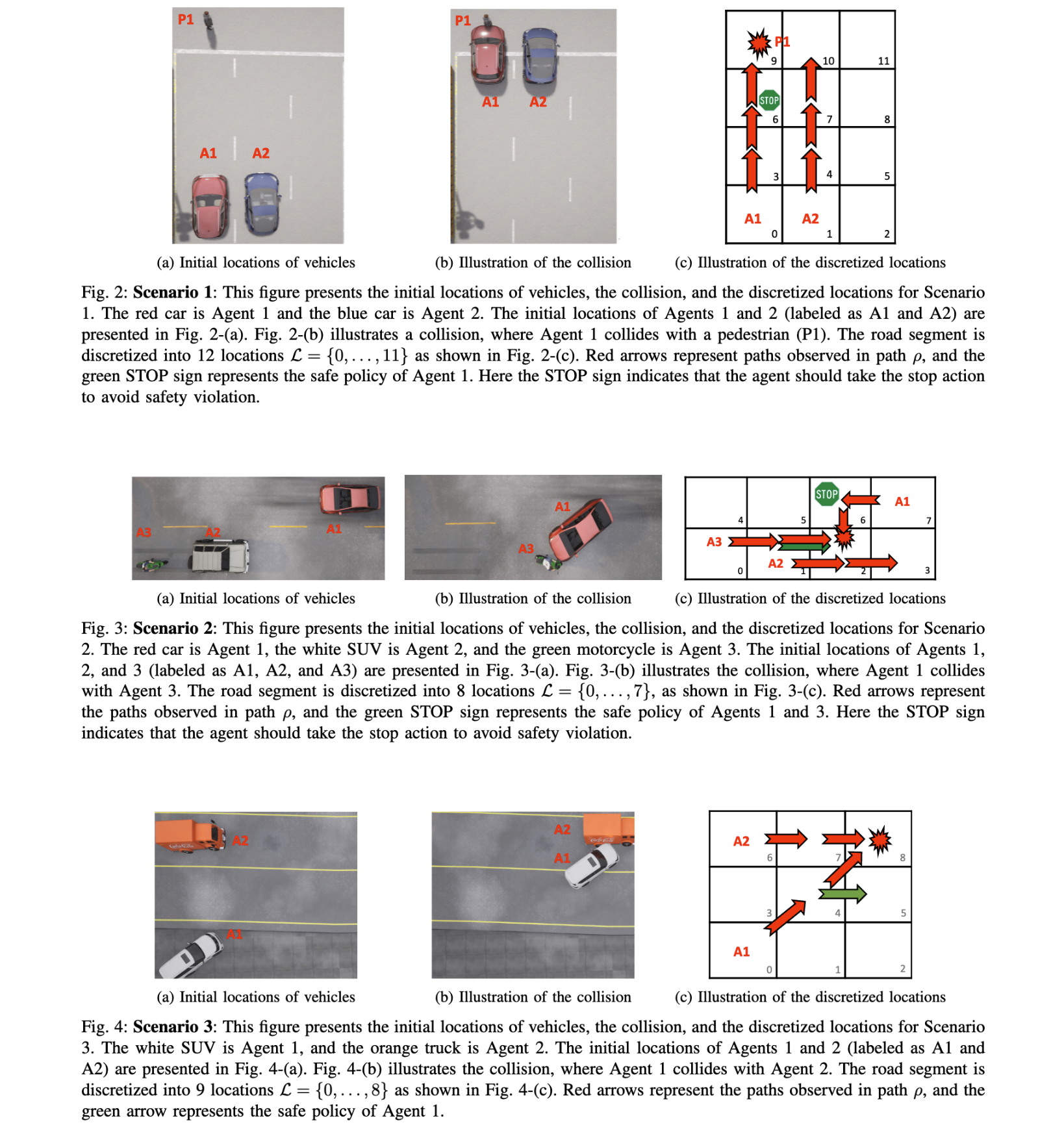 Who is Responsible? Explaining Safety Violations in Multi-Agent Cyber-Physical Systems2024
Who is Responsible? Explaining Safety Violations in Multi-Agent Cyber-Physical Systems2024 -
 Learning a Formally Verified Control Barrier Function in Stochastic EnvironmentIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024
Learning a Formally Verified Control Barrier Function in Stochastic EnvironmentIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024 -
 Verification and Synthesis of Compatible Control Lyapunov and Control Barrier FunctionsIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024
Verification and Synthesis of Compatible Control Lyapunov and Control Barrier FunctionsIn 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024 -
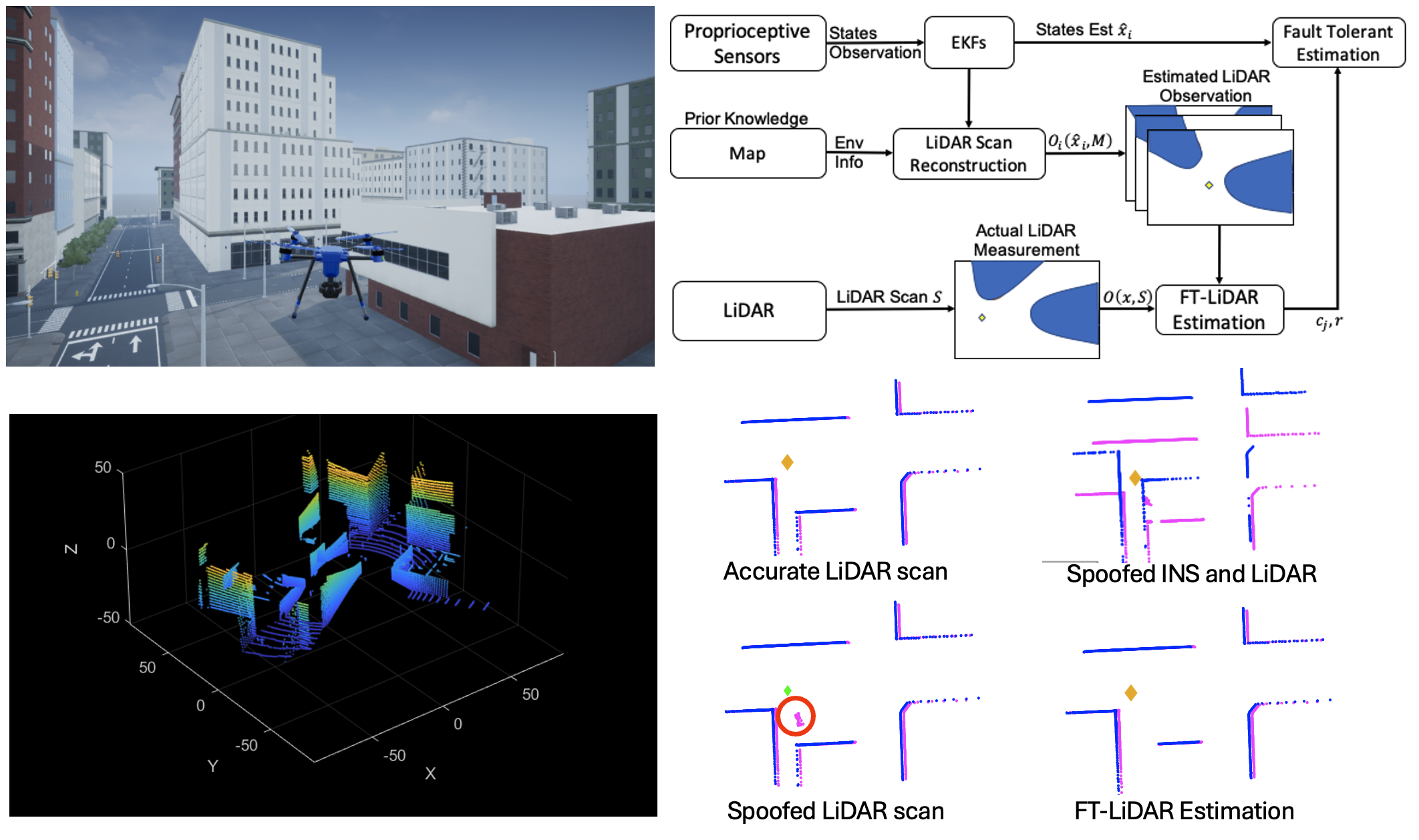
 Fault Tolerant Neural Control Barrier Functions for Robotic Systems under Sensor Faults and AttacksIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
Fault Tolerant Neural Control Barrier Functions for Robotic Systems under Sensor Faults and AttacksIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024





2023
-
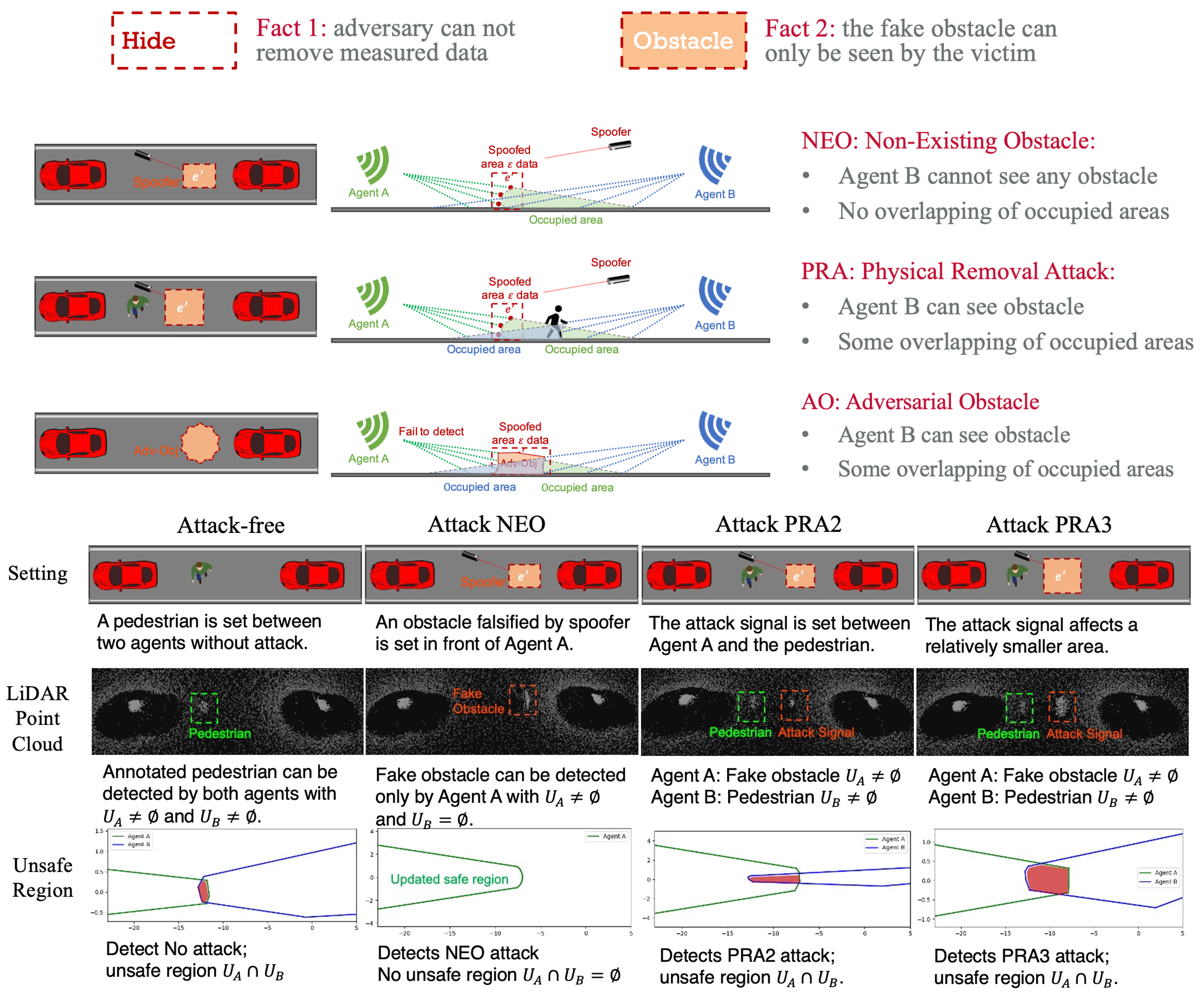 Cooperative Perception for Safe Control of Autonomous Vehicles under LiDAR Spoofing AttacksIn Symposium on Vehicle Security and Privacy (VehicleSec), 2023**General Motors Autodriving Security Award**
Cooperative Perception for Safe Control of Autonomous Vehicles under LiDAR Spoofing AttacksIn Symposium on Vehicle Security and Privacy (VehicleSec), 2023**General Motors Autodriving Security Award** -
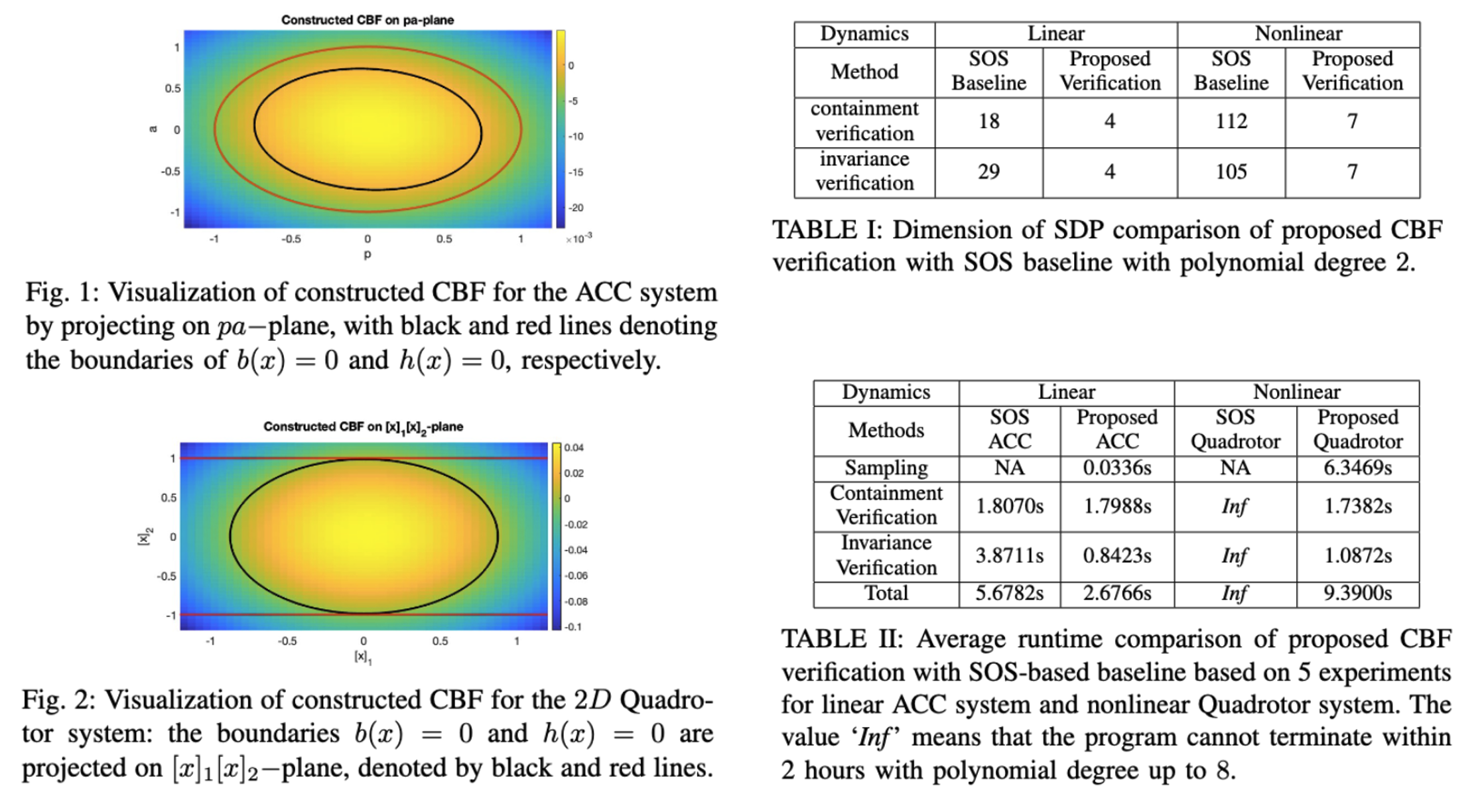 Efficient Sum of Squares-Based Verification and Construction of Control Barrier Functions by Sampling on Algebraic VarietiesIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023
Efficient Sum of Squares-Based Verification and Construction of Control Barrier Functions by Sampling on Algebraic VarietiesIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023 -
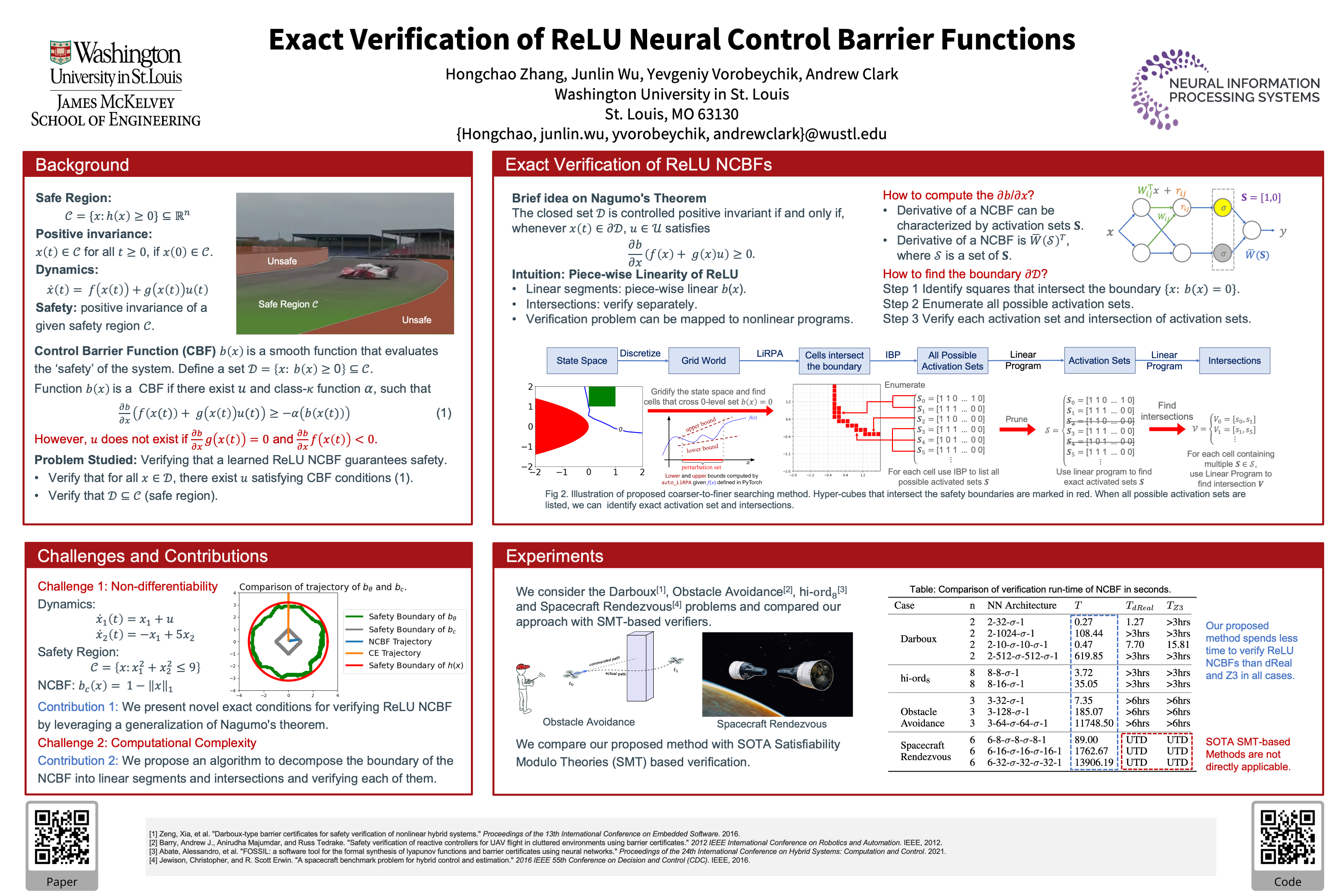 Exact Verification of ReLU Neural Control Barrier FunctionsIn Advances in Neural Information Processing Systems, 2023
Exact Verification of ReLU Neural Control Barrier FunctionsIn Advances in Neural Information Processing Systems, 2023



2022
-
 Barrier Certificate based Safe Control for LiDAR-based Systems under Sensor Faults and AttacksIn 2022 IEEE 61st Conference on Decision and Control (CDC), 2022
Barrier Certificate based Safe Control for LiDAR-based Systems under Sensor Faults and AttacksIn 2022 IEEE 61st Conference on Decision and Control (CDC), 2022

2021
-
 Safety-Critical Control Synthesis for Unknown Sampled-Data Systems via Control Barrier FunctionsIn 2021 60th IEEE Conference on Decision and Control (CDC), 2021
Safety-Critical Control Synthesis for Unknown Sampled-Data Systems via Control Barrier FunctionsIn 2021 60th IEEE Conference on Decision and Control (CDC), 2021 -
 Model-based Reinforcement Learning with Provable Safety Guarantees via Control Barrier FunctionsIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Model-based Reinforcement Learning with Provable Safety Guarantees via Control Barrier FunctionsIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021


2020
-
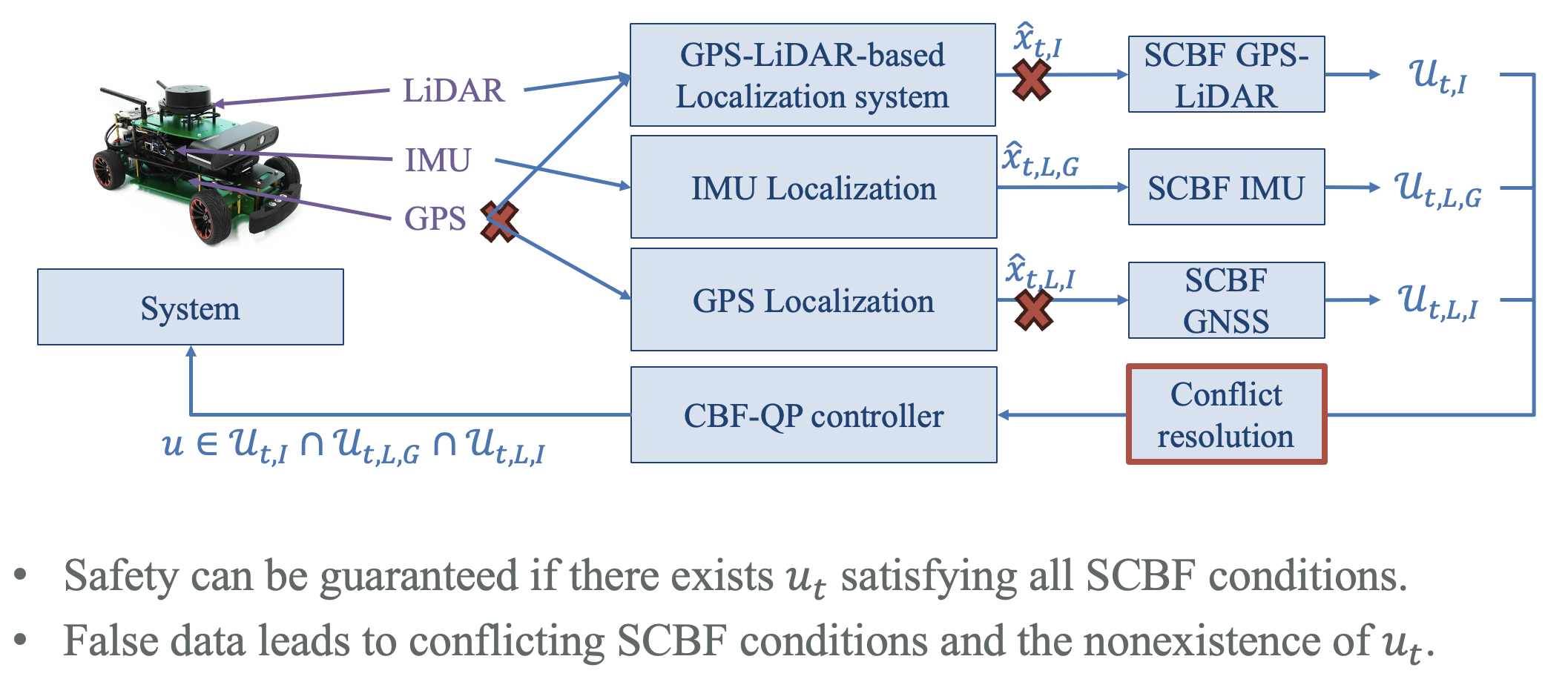 Control Barrier Functions for Safe CPS Under Sensor Faults and AttacksIn 2020 59th IEEE Conference on Decision and Control (CDC), 2020
Control Barrier Functions for Safe CPS Under Sensor Faults and AttacksIn 2020 59th IEEE Conference on Decision and Control (CDC), 2020
